
Nginceng rumah pak RT pake Phantom 3 PRO, BISA!
Bila di banyak kesempatan saya lebih fokus membahas aerial mapping dengan UAV jenis fixwing, kali ini saya melakukan ujicoba dengan menggunakan drone copter yaitu DJI Phantom 3 Pro. Software flightplan yang saya gunakan adalah datamapper inflight. Berikut ini langkah-langkahnya.
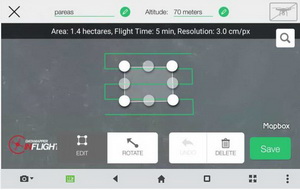 |
Ini adalah halaman awal datamapper inflight yang sudah saya create jalur terbang otomatisnya. Untuk luasan saya buat kecil saja dengan durasi 5 menit terbang, area 1.4 hektar, dan target GSD 3.0 cm/px. Tinggi terbang 70 meter. Pilih save untuk menyimpan. |
 |
Masuk ke setting, disini perlu diset measurement unit dalam meter. Selanjutnya pilih advanced settings. |
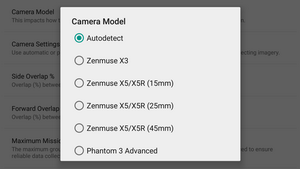 |
Pertama pilih kamera model. Saya menggunakan autodetect. |
 |
Kedua pilih kamera setting. Saya menggunakan default, yaitu automatic. |
 |
Pengaturan overlap pada percobaan ini saya gunakan 80%. |
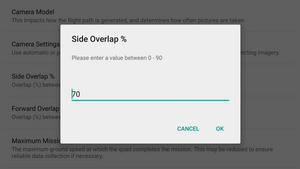 |
Pengaturan sidelap saya gunakan 70%. |
 |
Maksimum speed saya gunakan 13 m/s. |
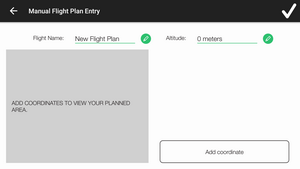 |
Apabila kita ingin menambahkan input koordinat secara manual bisa dilakukan di tab seperti gambar disebelah ini. Jangan lupa untuk menset tinggi terbang. |
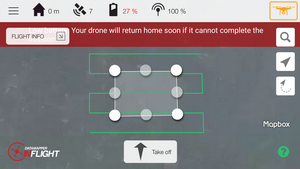 |
Kita diarahkan ke halaman seperti disamping ini, klik Take off. Garis hijau adalah jalur terbang yang akan dilewati oleh drone. Sedangkan garis putih dengan waypoint adalah batasan area yang bisa kita edit. Garis hijau tidak bisa diedit. Jadi apabila akan melakukan perubahan, kita bisa mengubah area kerja dimana waypoint tergambar. |
 |
Tunggu upload mission. Dan drone siap menuju lokasi flightplan yang kita buat sebelumnya. Menggunakan metode otomatis ini yang pertama akan dipotret oleh drone adalah titik di kanan atas dan berakhir di titik terakhir dikiri bawah daripada flightplan. |
Mudah bukan memotret dengan menggunakan metode otomatis. Hampir tidak diperlukan keahlian pilot untuk mengarahkan drone ke jalur terbang yang kita buat. Setelah selesai melakukan pemotretan, secara otomatis drone akan kembali ke Home dimana kita pertama kali mengatur posisi take off. Tapi jangan 100% ketika drone pulang ke home dibiarkan saja autolanding. Kalau saya sendiri guna menghindari hal-hal yang tidak diinginkan, untuk kembali turun ke tanah saya arahkan secara semi manual, alias mode saya ganti jadi P, dan stik saya mainkan agar landing berada di tempat yang aman. Ini buat jaga-jaga kalau kalau ada sesuatu dari mode full otomatis ini, karena saya yakin ketika drone kembali ke home, posisi tidak selalu tepat berada di atas posisi paa saat take off. tau kenapa? Yup benar sekali, karena kualitas GPSnya yang kurang teliti, beda cerita kalau GPS yang digunakan adalah GPS RTK.
Selanjutnya data saya download. Dan kali ini saya tidak menggunakan Agisoft photoscan pro untuk processing, tetapi saya menggunakan aerial photogrametry software menci.

Bila dibandingkan dengan agisoft, software ini tidak kalah simple nya dalam melakukan processing data. Sesuai dengan urutan menunya, dari atas ke bawah. Overview adalah hasil processing dari load image yang diprocess. Pada tahap ini diperlukan konfigurasi kamera dengan nilai = ((lebar sensor (mm)/lebar pixel (px))+(tinggi sensor(mm)/tinggi pixel (px)))/2.
Kalibrasi kamera bisa dilakukan sebelum melakukan pengolahan data dengan menggunakan data pada 4 jalur terbang yang bener bener tegak lurus saja. Baca disini.
Karena saya tidak menggunakan GCP pada pemotretan ini, saya langsung ke langkah koreksi radiometrik color balancing. Koreksi ini cukup berguna untuk meningkatkan kualitas visual dari tiap image. Selanjutnya adalah membuat DSM. Pada langkah DSM ini pointcloud dibuat. Selanjutnya dari pointcloud ini bisa kita buat DTM. Berbeda dengan agisoft dimana kita bisa input setting filtering gorund, pada menci ini kita cukup memilih suburban, forest dan sebagainya hanya dengan input threshold saja. Untuk lebih detilnya akan saya bahas dilain waktu. Dari DTM bisa langsung kita buat kontur. Perhatikan tampalan kontur dan orthofoto berikut ini.


Gambar sebelah kanan adalah overlay kontur dengan orthofoto, dan gambar sebelah kiri adalah DTM yang dibuat dari pointcloud. Langkah selanjutnya adalah membuat seamless editing. Saya sudah mencoba seamless editing di agisoft. Dengan fitur yang sama, saya rasa di menci lebih fleksibel dan lebih akurat dalam mengkoreksi area-area yang mleyot-mleyot. Koreksi ini sangat berguna. Terakhir adalah membuat orthofoto. Satu klik saja semua sudah terbentuk dan tersimpan pada path folder penyimpanan di awal melakukan upload data.
Sebagai penutup, berikut analisa singkat dari hasil pemotretan saya.

Jumlah foto 30 buah.
Luas area 0.036 km2 atau 3.6 hektar.
GSD 0.028 meter/piksel atau 2.8 cm/piksel.
Proyeksi pada UTM dan datum yang digunakan adalah WGS84.
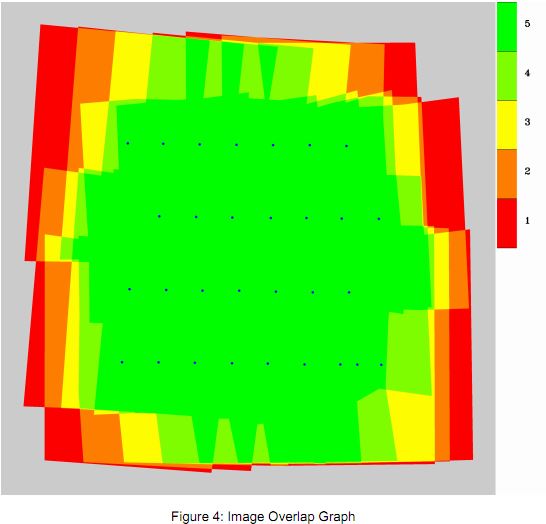 Pada gambar disamping ini menunjukkan tingkat overlap foto. Area hijau adalah area dengan pertampalan terbesar. Perhatikan titik-titik posisi kamera. Dari settingan yang kita lakukan pada datamapper inflight, rupanya drone cukup konsisten menterjemahkan perintah overlap 80%. Hal ini terlihat dari konsistensi jarak antar posisi kamera.
Pada gambar disamping ini menunjukkan tingkat overlap foto. Area hijau adalah area dengan pertampalan terbesar. Perhatikan titik-titik posisi kamera. Dari settingan yang kita lakukan pada datamapper inflight, rupanya drone cukup konsisten menterjemahkan perintah overlap 80%. Hal ini terlihat dari konsistensi jarak antar posisi kamera.
Anda tertarik mencobanya? Silahkan dicoba. Semoga bermanfaat.


